

شكر خاص
من
قسم الجغرافيا و نظم المعلومات الجغرافية
ومن
الأب الروحى لشعبة المساحة و الخرائط بمصر
الاستاذ الدكتور / أحمد أحمد السيد مصطفى
ومن
رابطة خريجى المساحة و الخرائط و نظم المعلومات الجغرافية بالجامعات المصرية
للمهندس
مصطفى الفضالى
على تقديمة لمحاضرة عن gps لطلاب الفرقة الرابعة مساحة
و كانت متمثله فى شرح احد اجهزة ال gps من النوع garmin
و هو الجهاز
promark 3
مانيول الجهاز
http://pro.magellangps.com/assets/da...Mark3_EN_l.pdf
http://www.igage.com/mp/pm3/images/PM3RTK.pdf
http://www.igage.com/mp/pm3/images/P...%20rev%20D.pdf
http://www.igage.com/mp/pm3/images/P...%20rev%20D.pdf
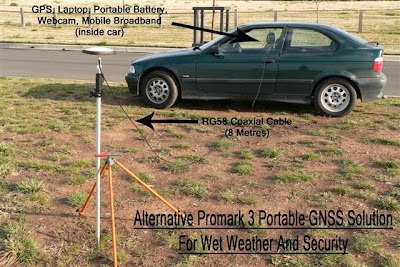
شكل الجهاز
الجهاز قبل نصبه
مواصفات الجهاز
الصفحة الاولى
النقطة المرجعية Base و هى النقطة المعلومة الاحداثيات و التى تحتلها الوحدة الاولى من وحدات الجهاز عند عمليه الرفع
النقطة المراد ايجاد احداثياتها Rover و هى النقطة الغير معلومة الاحداثيات و التى يحتلها الوحدة الثانيه ( الجهاز الثانى) و ذلك لايجاد احداثياتها
الرصد المتحرك اللحظى R T K
يقصد بطريقة الرصد هي الطريقة التي يتبعها المساح في استخدامه للجهاز, و هو الذي يقرر الطريقة التي يتبعها في الرصد تبعا للعوامل التالية:
- إمكانية الجهاز المستخدم. – عدد الأجهزة المتوفرة.
- الدقة المطلوبة من العمل. – العدد المتوفر من المساحين.
- البرنامج الحسابي المستخدم لمعالجة الأرصاد. – الوقت اللازم لانجاز المشروع.
و تقسم طرق الرصد بواسطة GPS إلى:
• الملاحة والتوجيه Navigation Survey.
• الرصد الثابت Static Survey.
• الرصد الثابت السريع Rapid Static Survey.
• الرصد المتحرك Kinematic Survey :
و هذه الطريقة الوحيدة التي يتم تحريك الجهاز الذي يقوم بالرصد مع وضع جهاز ثابت فوق نقطة مرجعية معلومة الإحداثيات، و تقسم هذه الطريقة إلى ثلاث طرق فرعية حسب آلية الرصد هي:
الثبات و الحركة Stop & Go.
الرصد المستمر Continuous.
الرصد المتحرك اللحظي (RTK) Real Time Kinematic وهي موضوعنا.
الرصد المتحرك اللحظي (RTK) Real Time Kinematic:
هي الطريق التي يتم فيها ارسال الاشارة المصححة (Correction GPS signal) لحظيا من الجهاز المرجعي(Reference) الموجود فوق نقطة معلومة الاحداثيات الى جهاز متحرك (Rover) او اكثر في نفس الوقت و الموجود فوق نقطة مجهولة الإحداثيات ليتم حساب إحداثيات هذه النقطة لحظيا و بالنظام المحلي دون الحاجة للرجوع للمكتب من اجل عملية معالجة الرصد.
احتياجات نظام الرصد المتحرك اللحظي (RTK):
الوحدة (المحطة) الثابتة (Reference Unit):
• و هي عبارة عن جهاز (GPS) مثبت فوق نقطة معلومة الاحداثيات.
الوحدات المتحركة (Rover Units):
• عبارة عن جهاز (GPS) او اكثر يتنقل فوق النقاط المراد رصدها ميدانيا .
خدمة ال (GPRS) أو Data Call أو إشارات راديو :
• و هي عبارة عن اداة لنقل الاشارات المصححة من الجهاز الثابت الى الاجهزة المتحركة.
معاملات التحويل (Transformation Parameters) للمنطقة المرصودة:
• وهي عبارةعن معاملات للتحويل من النظام العالمي WGS84 الى النظام المحلي سواء كان Cassini أو JTM ليتم الحصول على الاحداثيات بالنظام المحلي لحظيا في الميدان.
الية عمل طريقة الرصد المتحرك اللحظي (RTK):
يوضع جهاز ثابت فوق نقطة مرجعية معلوم إحداثياتها يكون مزود بجهاز مرسل إشارات راديوأو (GPRS) أو Data Call، و يتم إدخال إحداثيات النقطة بالجهاز مباشرة.
يقوم الجهاز بحساب التصحيح بين القيم المسجلة من الأقمار و بين الإحداثيات الفعلية للنقطة بالاضافة للتصحيحات الاخرى و من ثم يرسل مقدار التصحيح إلى الجهاز المتحرك فوق النقاط.
يقوم الجهاز المتحرك باستقبال التصحيحات المرسلة من المحطة المرجعية ليتم الحصول على احداثية مصححة بنظام WGS84 و عن طريق معاملات التحويل (Transformation Parameters) يقوم الجهاز بتحويل الاحداثية للنظام المحلي لحظيا و خلال ثوان.
فوائد نظام الرصد المتحرك اللحظي (RTK):
توفير الوقت:
يمتاز نظام الرصد المتحرك اللحظي بالسرعة مقارنة مع طرق الرصد الاخرى حيث اننا لا نحتاج العودة للمكتب للقيام بمعالجة الرصد.
توفير المصاريف:
• توفير في عدد الموظفين.
• توفير في عدد الاجهزة المستخدمة في الرصد.
• توفير في عدد السيارات المستخدمة.
إعطاء دقة عالية و بوقت قليل.
تغطية دائرة نصف قطرها 30 كم من مركز المحطة الثابتة , مع امكانية عمل محطة مرجعية مؤقتة (Temporary Reference Station) خارج نطاق المحطة الثابتة و ذلك باستخدام جهازين GPS يتم وضع احدهما كمحطة مرجعية Reference Station و الاخر متحرك Rover Station .
تطبيقات نظام الرصد اللحظي(RTK):
تثبيت الحدود.
رصد النقاط و حدود الاراضي.
توزيع نقاط مساندة لمستخدمي جهاز المحطة الشاملة.
المساهمة في البحث عن نقاط المثلثات المزالة او المفقودة.
الانشاءات.
الطبوغرافيا.
سيئات نظام الرصد اللحظي (RTK):
عدم القدرة على العمل في المناطق التي تحيطها مباني عالية او أشجار مع معالجة هذه النقطة في الأجهزة الحديثة و التي تعمل بنظام GNSS.
عدم تغطية الشبكة الخلوية لجميع المناطق مما يسبب صعوبة في الاتصال بين المحطة المتحركة و المحطة الثابتة مع إمكانية العمل بأجهزة الراديو (Radio Modem) في المناطق التي لا تغطيها الشبكة الخلوية.
التهيئه Initialization
وهى
تهييئه الجهاز على النقطة Rover للتعرف على احداثياتها بالمكوث عليها فترة من الزمن و ليكن 600 ثانيه قبل عمليه الرصد فى طريقتى STOP & GO و Kinematik
و هى اما ان تكون معلومة الاحداثيات known أو عن طريق هوائى اخر كما بالشكل التالى Bar
الصفحة الثانيه
1 - الصورة الاولى توضح الصفحة الرئيسية للجهاز
و عند الضغط على surveying
2 - تظهر الصفحة الثانيه الخاصة بالاقمار الصناعية التى التقطها الجهاز و يجب ان تكون على الاقل 4
3- الصورة الثالثة تحتوى على
رقم النقطة 0055
طريقة الرفع static
وصف النقطة st أى محطة
ارتفاع الهوائى 2.100
الوحدات المستخدمة meters
نوع الارتفاع المأخوذ للهوائى slant أى مأخوذة من حافة الهوائى أنظر شكل 5 صفحة 3
الفرق بين كل رصدتين 1 sec أى يأخذ رصدة كل واحد ثانيه
و عند التأشير على control point تؤخذ كنقطة تحكم اساسية
ثم نضغط ok
4- الصورة الرابعة طريقة static
file name
1111a09.073
1111 الاى دى الخاص بالجهاز
a تعنى ان هذا الملف هو الملف الاول فى يوم الرصد
09 تعنى اننا سنة 2009
0.073 تعنى اننا اليوم ال 73 فى السنة 14 مارس 2009
بعد النقطة rover عن ال base = بالكيلومترات 3.5 كم و يجب الا تزيد عن 10 كم
عامل الضعف فى الدقة 2.2 و يجب الا يزيد عن 4
5 - الصورة الخامسه نختار طريقة اخرى من طرق الرفع stop & go
و هكذا
الصفحة الثالثة
صورة 1 توضح طريقة الرصد عن طريق static
و هى ان نثبت الجهاز الاول على نقطة معلومة الاحداثيات base و فى نفس الوقت يثبت الجهاز الثانى عند النقطة المراد حساب احداثياتها rover بحيث لا تزيد المسافة بينهما عن 10 كم
و توضح أن عمليه المعالجة على الحاسب الالى لاتتم الا فى الوقت المتقاطع فى الرصد لكل من الجهازين
5 - رصد ارتفاع الهوائى من مركزة vertical
أو من طرفة slant
الصفحة الثالثة
و فيها يتم تثبيت جهاز فوق النقطة معلومة الاحداثيات
أما الجهاز الاخر فيتحرك على النقط المراد رصدها بعد عمل التهيئة لها و ليكن النقط من 1 الى 7
فنجد ان وقت الرصد فى الجهاز الاول متصله أما فى النقط من 1 الى 7 تكون منفصله عند رصد كل نقطةو بالتالى يتم معالجة النقطة كل منها على حدى عن طريق تقاطع الوقت
أرجو أن أكون قد وفقت فى توضيح الفكرة
أخيكم
محمد سعد يس
+ إنشاء موضوع جديد
النتائج 1 إلى 10 من 73
-
03-15-2009, 01:00 AM #1Status
- Offline

- تاريخ التسجيل
- Sep 2008
- الدولة
- Alexandria, Egypt
- المشاركات
- 699
 عضو فضى 80%
عضو فضى 80%
- معدل تقييم المستوى
- 6598
 شكر للمهندس مصطفى الفضالى على تقديمة لمحاضرة عن GPS Promark 3 لطلاب رابعة مساحة
شكر للمهندس مصطفى الفضالى على تقديمة لمحاضرة عن GPS Promark 3 لطلاب رابعة مساحة
التعديل الأخير تم بواسطة Mohamed Saad Yassin ; 03-15-2009 الساعة 01:04 AM
باراك أوباما
يـجب أن نربي أبـناءنا ليصبحوا كشباب مصر
رئيس وزاراء ايطاليا
لا جديد في مصر فقد صنع المصريون التاريخ كالعاده
ستولتنبرج رئيس وزراء النرويج
اليوم كلنا مصريين
هاينز فيشر رئيس النمسا
شعب مصر أعظم شعوب الأرض و يستحق جائزة نوبل للسلام
سى ان ان
لأول مرة نرى شعبا يقوم بثورة ثم ينظف الشوارع بعدها
مصرى و أفتخر


و افوض امري الى الله .. ان الله بصير بالعباد
أرجو منكم الدعاء عن ظهر الغيب

-
03-15-2009, 01:08 AM #2Status
- Offline
- تاريخ التسجيل
- Sep 2008
- المشاركات
- 3,306
 اخصائي مساحة وخرائط دفعة 2009
اخصائي مساحة وخرائط دفعة 2009
- معدل تقييم المستوى
- 9252




 مقدرش اقول غير
مقدرش اقول غير
الف الف شكر علي هذا المجهود الذي لا يقدر بمال
جزاك الله كل خير عن هذا العمل الرائعسأكتب و أكتبولن أتوقففأنا قلمي لن يجف ابدا
-
03-15-2009, 01:11 AM #3Status
- Offline
- تاريخ التسجيل
- Sep 2008
- الدولة
- Alexandria, Egypt
- المشاركات
- 699
عضو فضى 80%
- معدل تقييم المستوى
- 6598
بعض الصور عن الجهاز













التعديل الأخير تم بواسطة Mohamed Saad Yassin ; 03-15-2009 الساعة 01:15 AM
باراك أوباما
يـجب أن نربي أبـناءنا ليصبحوا كشباب مصر
رئيس وزاراء ايطاليا
لا جديد في مصر فقد صنع المصريون التاريخ كالعاده
ستولتنبرج رئيس وزراء النرويج
اليوم كلنا مصريين
هاينز فيشر رئيس النمسا
شعب مصر أعظم شعوب الأرض و يستحق جائزة نوبل للسلام
سى ان ان
لأول مرة نرى شعبا يقوم بثورة ثم ينظف الشوارع بعدها
مصرى و أفتخر
و افوض امري الى الله .. ان الله بصير بالعباد
أرجو منكم الدعاء عن ظهر الغيب
-
03-15-2009, 01:17 AM #4Status
- Offline
- تاريخ التسجيل
- Sep 2008
- الدولة
- Alexandria, Egypt
- المشاركات
- 699
عضو فضى 80%
- معدل تقييم المستوى
- 6598
 المشاركة الأصلية كتبت بواسطة Hassan Mohamed
المشاركة الأصلية كتبت بواسطة Hassan Mohamed
 شكرا عالمرور يا حسن
شكرا عالمرور يا حسن
و يارب تكون استفدتباراك أوباما
يـجب أن نربي أبـناءنا ليصبحوا كشباب مصر
رئيس وزاراء ايطاليا
لا جديد في مصر فقد صنع المصريون التاريخ كالعاده
ستولتنبرج رئيس وزراء النرويج
اليوم كلنا مصريين
هاينز فيشر رئيس النمسا
شعب مصر أعظم شعوب الأرض و يستحق جائزة نوبل للسلام
سى ان ان
لأول مرة نرى شعبا يقوم بثورة ثم ينظف الشوارع بعدها
مصرى و أفتخر
و افوض امري الى الله .. ان الله بصير بالعباد
أرجو منكم الدعاء عن ظهر الغيب
-
03-15-2009, 01:26 AM #5Status
- Offline

- تاريخ التسجيل
- Sep 2008
- المشاركات
- 335
عضو محترف 50%
- معدل تقييم المستوى
- 6232
نشكر د \ أحمد مصطفى على الفرصه الى بيعرفنا فيها على مهندسين بجد زى باش مهندس مصطفى الفضالى وربنا يجزيه خير على محاضرة النهارده وتسلم يا أستاذنا أستاذ محمد سعد على الأيضاح الجميل
وخير كلمة خرجت فاصابت
-
03-15-2009, 02:19 AM #6Status
- Offline
- تاريخ التسجيل
- Sep 2008
- الدولة
- Alexandria, Egypt
- المشاركات
- 699
عضو فضى 80%
- معدل تقييم المستوى
- 6598
المشاركة الأصلية كتبت بواسطة tiger
شكرا يا اشرفباراك أوباما
يـجب أن نربي أبـناءنا ليصبحوا كشباب مصر
رئيس وزاراء ايطاليا
لا جديد في مصر فقد صنع المصريون التاريخ كالعاده
ستولتنبرج رئيس وزراء النرويج
اليوم كلنا مصريين
هاينز فيشر رئيس النمسا
شعب مصر أعظم شعوب الأرض و يستحق جائزة نوبل للسلام
سى ان ان
لأول مرة نرى شعبا يقوم بثورة ثم ينظف الشوارع بعدها
مصرى و أفتخر
و افوض امري الى الله .. ان الله بصير بالعباد
أرجو منكم الدعاء عن ظهر الغيب
-
03-15-2009, 06:56 AM #7Status
- Offline
- تاريخ التسجيل
- Sep 2008
- الدولة
- Alexandria, Egypt, Egypt
- المشاركات
- 2,482
اخصائي مساحة خرائط و نظم معلومات جغرافية
- معدل تقييم المستوى
- 8408
بجد عندنا ناس بنتشرف بيهم جدا
البشمهندس مصطفى الفضالي مسبش فكرة او نقطه الا لما وضحها بشكل عملي
و الشكر كل الشكر للدكتور احمد مصطفى انه ادانا الفرصه اننا نتعلم من اساتذه شغل كبار
وشكرا يا استاذي محمد سعد على مجهودك في توضيح و صياغه المحاضرة بالشرح الوافي اللي عرضته لينا
بحييك على مجهودك يا استاذنا
شكرا جزيلا و جزاك الله كل خير

-
03-15-2009, 11:57 AM #8Status
- Offline
- تاريخ التسجيل
- Sep 2008
- المشاركات
- 36
عضو مشارك 20%
- معدل تقييم المستوى
- 0
ألف ألف ألف ألف شكر الى الدكتور العظيم حبيب الملايين: أحمد أحمد مصطفى
أن أتاح لنا هذه المحاضرة الرائعة للآستاذ المحترم/ مصطفى فضالى
شاكرين مجهودة الكبير فى شرح المحاضرة
ونشكر أستاذنا العزيز:محمدسعد على هذا المجهود الجميل
والتوضيح الرائع
و يا رب يجازيكم عنا ماتفعلوه لنا كل الخير
لو لم اكن تاكيومتريا
لودت ان اكون تاكيومتريا
-
03-15-2009, 12:40 PM #9Status
- Offline
- تاريخ التسجيل
- Sep 2008
- الدولة
- North-England
- العمر
- 36
- المشاركات
- 1,877
مشرف قسم تنميه الموارد البشريه
- معدل تقييم المستوى
- 7842
جزاكم الله خيرا عن كل هذا المجهودWe are One Team
Help Each OTher
Team Work
We Are
Knights of the earth
اســــــــــــــــــلام عمـــــــــــــــــــــــــــران

-
03-15-2009, 10:09 PM #10Status
- Offline
- تاريخ التسجيل
- Oct 2008
- المشاركات
- 7
VIP
- معدل تقييم المستوى
- 0
كل الشكر للدكتور أحمد مصطفي
كل الشكر للدكتور أحمد مصطفي الذي أتاح لي الفرصة لألقاء هذه المحاضرة
والشكر لأبنائنا الطلبه للتعليقات الطيبة وأرجو أن أكون قد أفدتهم
وشكر للأستاذ محمد سعد الذي سارع نشر الموضوع بشكل جيد في نفس اليوم










 رد مع اقتباس
رد مع اقتباس



المفضلات